Rovatok 2015-től
Rovatok
- Bemutatkozás »
- Fejlesztés beruházás »
- Informatika »
- Korszerűsítés »
- Környezetvédelem »
- Közlekedésbiztonság »
- Közlekedéstörténet »
- Kutatás »
- Megemlékezés »
- Méréstechnika »
- Mérnöki ismeretek »
- Minőségbiztosítás »
- Szabályzatok »
- Technológia »
- Egyéb »
Szerzői segédlet
A Sínek Világa folyóirat szerzőinek összeállított szempontok és segédlet.
Tovább »Egyedi mérőrendszerrel végzett járműdinamikai mérések menetrend szerinti budapesti közúti vasúti járművek esetében
Bevezetés
Napjainkban a közúti vasúti pályák fenntartása és fejlesztése kiemelt jelentőséggel bír a városi közlekedési rendszerek hatékonyságának és biztonságának biztosítása érdekében. A Budapesti Közlekedési Zártkörűen Működő Részvénytársaság (BKV Zrt.) felelős a több mint 300 kilométer hosszú városi vasúti pályahálózat üzemeltetéséért és karbantartásáért, amely 27 vonalon különböző típusú felépítményrendszereket tartalmaz. Ezek állapotát rendszeresen helyszíni bejárásokkal, vágánygeometriai mérésekkel és járműdinamikai mérésekkel ellenőrzik.
A szerkezeti romlás – például a sínek, sínleerősítések, alátámasztások és burkolatok állapotának romlása – szabad szemmel is jól észrevehető. Ezzel szemben a geometriai romlás mértékének meghatározása speciális műszereket igényel. A Metalelektro Méréstechnika Kft. által gyártott TrackScan 4.01 műszerrel történik a geometriai romlás mérése, míg a járműdinamikai méréseket egy szintén a Metalelektro Méréstechnika Kft. által kifejlesztett mérővillamos végzi. A járműdinamikai mérőrendszer egy Ganz nyolctengelyű ipari csuklós villamos motorkocsin található, amely 25 km/h maximális sebességgel képes méréseket végezni.
Azonban a menetrend szerinti, általában 50 km/h sebességgel közlekedő járművek dinamikájának pontos megismerése érdekében szükség van egy olyan mérőrendszerre, amely valós időben képes adatokat gyűjteni a normálüzem közben. Kutatásunk során kifejlesztettünk egy gyorsulásmérőkből és GPS-ből álló hordozható műszert, amely lehetővé teszi bármilyen típusú és bármikor közlekedő villamoson a járműdinamikai mérések végrehajtását.
Ez az új mérőrendszer lehetőséget biztosít arra, hogy pontosabb és relevánsabb adatokat gyűjtsünk a városi vasúti pályák állapotáról, hozzájárulva ezzel a karbantartási munkák hatékonyságának és a közlekedés biztonságának növeléséhez. A valós idejű járműdinamikai adatok elemzése segíthet a pálya geometriai hibáinak korai felismerésében és a szükséges beavatkozások időben történő elvégzésében. Ezáltal a városi vasúti rendszer megbízhatósága és utazási komfortja is javul, ami közvetlenül hozzájárul a közösségi közlekedés népszerűségének növeléséhez és a városi közlekedési hálózat fenntartható fejlődéséhez.
Irodalomkutatás
A vasúti pályageometriai és a járműdinamikai mérések közötti kapcsolat figyelembevétele elengedhetetlen lesz a jövőben mind a nagyvasúti, mind a közúti vasúti (villamos), mind pedig a közúttól elkülönített vasúti (például metró) rendszerek biztonságának, megbízhatóságának és hatékonyságának biztosításához. Jelenleg sok pályavasúti üzemeltető és vasúttársaság csak egyenként végzi el ezeket a méréseket, az egymás közti összhangot, illetve az egyes okokat nem keresi és elemzi. Sok esetben előfordul, hogy járműdinamikai méréseket egyáltalán nem végeznek, vagy ha végeznek is, akkor nem a menetrend szerinti járműveknek megfelelő mérési sebességgel. (A BKV esetében a mérővillamos például ezen utóbbi kategóriába esik, bár évek óta tervben van a mérési sebesség növelése.) Az irodalomkutatásunkban azt a célt tűztük ki, hogy nemzetközi példákon keresztül bemutassuk, mi a jelentősége és hogyan lehet ezeket a méréseket integrálni és esetlegesen felhasználni a pályageometriai hibák előrejelzésére és kezelésére.
A vasúti pálya geometriai jellemzőinek és a járműdinamikai mérések összefüggéseinek vizsgálata kulcsfontosságú a vasúti közlekedés biztonságának és hatékonyságának szempontjából. A pálya geometriai hibái közvetlenül befolyásolják a járművek dinamikai viselkedését, amelyeket különféle érzékelők segítségével mérhetünk [1, 2]. A pálya geometriája, beleértve a hosszfekszintet (süppedés), az irányt, a keresztfekszintet (túlemelést) és a nyomtávolságot, mind befolyásolja a biztonságos és hatékony vasúti járműközlekedést [3]. Az egyenetlenségek különböző típusai eltérő dinamikai válaszokat generálnak a járműveknél [4], és ezek hatással vannak a jármű-pálya rendszerben fellépő erőkre [1].
A járműdinamikai mérések célja a járművek rezgéseinek és gyorsulásainak mérése és rögzítése, amelyekből következtetni lehet a pálya geometriájának hibáira [5]. A mérésekhez gyorsulásmérőket és giroszkópokat használnak, amelyek lehetővé teszik a dinamikus kerék-sín érintkezési erők pontos mérését [6]. A speciális „yaw-rate” giroszkópok különösen hasznosak a pályageometria hibáinak detektálásában [7].
A geometriai hibák, például a hosszfekszint és keresztfekszint eltérései, jelentősen befolyásolják a jármű dinamikai viselkedését. A dinamikai mérések segítségével azonosíthatók ezek a hibák, és előre jelezhető a pálya állapotának romlása [6]. Például a kerékpár függőleges gyorsulásai és a hosszfekszint közötti korreláció magas, különösen a torzításmentes adatsorok esetében (az FMK-007-es mérőkocsi süppedésadatsorairól, a már torzításmentesített adatokra értendően) [1]. Az oldalgyorsulásokat leginkább a keresztfekszint-változások befolyásolják, különösen annak második deriváltja [1].
A hagyományos amplitúdóalapú hibaértékelés helyett a pálya hosszfekszintjének második deriváltja felhasználásával pontosabb kép adható a jármű-pálya rendszerben fellépő erőkről [1]. A hosszfekszint második deriváltja jelentősen befolyásolja a függőleges gyorsulásokat és ezáltal a függőleges jármű-pálya erőket, és jobb becslést ad, mint az MSZ EN 13848-6 harmonizált európai szabvány [8] szerinti referencia-TQI-k (track quality index) használata [6]. A járműdinamikai mérések során kiderült, hogy a kerékcsapágy oldalirányú (vízszintes) gyorsulása és a keresztfekszinthibák második térbeli deriváltja között erős, 0,8 körüli korrelációs együttható található egyenes pályaszakaszokon, 80–130 km/h sebességtartományban [6].
A geometriai hibák dinamikai mérésekből történő előrejelzésére különböző módszereket alkalmaznak. Például a térbeli eltolódások korrekciójával biztosítható az egymást időben követő mérések pontos összehangolása [5]. Az algoritmusok, mint például a keresztkorrelációs technikák, segítenek azonosítani és korrigálni a mérések közötti eltéréseket, ami lehetővé teszi a geometriai hibák pontos előrejelzését [5]. A hierarchikus Bayes-modellek rugalmasságot biztosítanak a korábbi adatok és szakértői megállapítások kombinálására az új adatokkal, lehetővé téve a pályageometriai degradáció előrejelzését [9].
A geometriai hibák alapján a dinamikai válaszok előre jelzése is fontos szerepet játszik a vasúti pálya karbantartásában. Regressziós modellek és sztochasztikus módszerek segítségével modellezhetők a pályageometria statisztikai tulajdonságai és dinamikai hatásai [10]. A tanulmányok kimutatták, hogy a generált pályageometriák frekvencia- és statisztikai tartalma hasonló a mért geometriákhoz, ami biztosítja, hogy a dinamikai mérések során kapott eredmények megbízhatók és pontosak [10]. Az olyan eszközök, mint a SIMPACK és Abaqus szoftverek integrálása lehetővé teszi finomított jármű-pálya dinamikai modellek létrehozását, amelyek figyelembe veszik a véletlenszerű dinamikai válaszokat [4].
Franciaországban az IRIS 320 mérővonat segítségével a vasúti pálya geometriáját rendszeresen és precízen mérik, ami lehetővé teszi a pálya geometriai hibái időbeli fejlődésének követését [11]. A geometriai hibák és a dinamikai válaszok közötti összefüggések vizsgálata során sztochasztikus modellezéssel szimulálták a vonat dinamikáját, amely segíti a karbantartási döntések optimalizálását [11]. A VTI (virtual track inspection) -modell szimulációi alapján kimutatták, hogy a dinamikus hossz-szintek periodikus jelleget mutatnak, ahol a ciklushossz megegyezik a híd fesztávjával [12].
A kutatás során kifejlesztett teljesítményalapú pályageometria (performance-based track geometry – PBTG) ellenőrzési technológia valós időben köti össze a pályageometriát és a jármű teljesítményét, neurális hálózatok segítségével felismerve a komplex mintázatokat és a nemlineáris összefüggéseket [13]. A PBTG-technológia képes a pályaszakaszok azonosítására, amelyek rossz járműteljesítményt vagy kisiklásveszélyt okozhatnak, valamint karbantartási javaslatokat generál az észlelt hibákra vonatkozóan [13].
A [4] tanulmány szerint a figyelembe vett kínai nagy sebességű vasútvonalakon mért járműdinamikai válaszok kissé magasabbak voltak, mint a németországiak esetében mért értékek, és a dinamikai válasz amplitúdója lineárisan nőtt a vonat sebességével. Az EM120 gépi mérései a teherán–karaji vasútvonalon megállapították, hogy a vasúti pálya geometriai paraméterei közül az irány- és a nyomtávolság-paraméterek mutatják a legnagyobb korrelációt a megtámasztási merevséggel (support stiffness) [14].
Az új pályageometriai index (improved track geometry index – ITGI) alkalmazása során a síndőlés figyelembevételével jelentősen javítható a pályageometriai indexek pontossága, amelyek a pálya általános állapotát jelzik [15]. A GNSS (Global Navigation Satellite Systems) technológia fejlődése lehetővé tette a vasúti pálya pontos geometriai felmérését, amely alapvető adatokkal szolgál a járműdinamikai viselkedés előrejelzéséhez és elemzéséhez [16].
Az okostelefonok beépített gyorsulásmérői és giroszkópjai képesek megbízható adatokat szolgáltatni a járműdinamika terén, és az okostelefonos mérések korrelációja a VDMS (Vehicle Dynamic Measuring System) adataival meghaladja a 90%-ot [17]. Az adatvezérelt modellek, például a gépi tanulási algoritmusok, hatékonyan alkalmazhatók a pályageometriai hibák és a járműteljesítmény közötti kapcsolatok feltárására és előrejelzésére [18].
A [19] kutatása során kifejlesztett vizuális mérőrendszer segítségével a kerék és sín közötti távolság mérése lehetővé tette a nyomtáv pontos értékelését. A fraktál analízis hatékony eszköz a geometriai adatmintázatok számszerűsítésére és a karbantartási trendek elemzésére [3].
A közúti vasúti területre koncentráló kutatások kimutatták, hogy a pálya geometriájának szabálytalanságai jelentősen befolyásolják a közúti vasúti járművek dinamikus viselkedését, ami fokozott kopáshoz, zajhoz és potenciális biztonsági kockázatokhoz vezethet [20]. Az ilyen szabálytalanságok átfogó megértése elengedhetetlen a hatékony pályakarbantartás és a járműteljesítmény optimalizálása szempontjából [20].
A [21] publikált eredményei szerint a villamosok járműdinamikáját a villamos kerekei és a pálya közötti kölcsönhatás befolyásolja. Az olyan tényezők, mint a kerék-sín érintkezési erők, a felfüggesztés jellemzői és a jármű sebessége kritikus szerepet játszanak a villamosok dinamikai válaszának meghatározásában [21]. A pálya geometriájának változásai befolyásolják ezeket a dinamikus válaszokat, amelyek mérésével következtetni lehet a pálya állapotára [21].
A dinamikus mérések során a villamos járművek reakcióit rögzítik haladás közben [22], a rezgések, gyorsulások és erők adatainak rögzítésére gyorsulásmérőket, giroszkópokat és elmozdulásérzékelőket használnak [22]. Például a keréktárcsákról és a forgóvázakról rögzített gyorsulások feldolgozhatók a pálya szabálytalanságainak és a szükséges karbantartási műveletek meghatározására [22]. A pálya geometriájának szabálytalanságai jelentős változásokat okozhatnak a villamos járművek dinamikus viselkedésében [23]. Például a rövid hullámhosszúságú hibák megnövekedett dinamikus terhelésekhez vezethetnek, ami nagyobb kopási arányt és potenciális biztonsági kockázatokat eredményezhet [23]. Tanulmányok kimutatták, hogy a pályageometria hibái, mint például az irány- és a nyomtávváltozások, közvetlenül befolyásolják a járművek gyorsulását és a kerék-sín érintkezési erőit [23].
Budapesten egy újszerű járműdinamikai mérési elrendezést valósítottak meg, amely a forgalomban lévő villamosokra szerelt gyorsulásmérőket használ [22]. Ez a rendszer a pálya állapotának folyamatos nyomon követését biztosítja, lehetővé téve az időben történő karbantartást és a szolgáltatás minőségének javítását [22]. Az összegyűjtött adatokat a hagyományos geometriai mérésekkel és a vizuális ellenőrzésekkel validálták, bizonyítva a dinamikai mérési megközelítés hatékonyságát [22].
Az ismert pályageometriai adatok felhasználhatók a villamos járművek dinamikus válaszainak előrejelzésére [24]. A multibody-dinamikai modellekkel végzett szimulációk előre jelezhetik, hogy a pályageometria változásai hogyan befolyásolják a jármű viselkedését, lehetővé téve a megelőző karbantartást és a tervezési kiigazításokat a kedvezőtlen hatások mérséklése érdekében [24].
Összegzésként megállapítható, hogy a vasúti pálya geometriai hibái és a járműdinamikai mérések közötti szoros kapcsolat lehetővé teszi a pálya állapotának pontos felmérését és a karbantartási igények előrejelzését. A dinamikai mérések segítségével azonosíthatók a geometriai hibák, és ezek alapján meghatározhatók a szükséges karbantartási intézkedések. A geometriai hibák és dinamikai válaszok közötti összefüggések figyelembevételével javítható a pálya biztonsága és a járművek üzemi teljesítménye.
A vasúti pályageometria és a járműdinamika kölcsönhatásának alapos megértése létfontosságú a közlekedési rendszerek biztonságának és hatékonyságának javítása érdekében. Ahogy fent részletesen bemutattuk, számos tanulmány vizsgálta már a vasúti pályák geometriai eltérései és a járműdinamikai reakciók közötti kapcsolatot. A közúti vasútra vonatkozó tanulmányok száma korlátozott. Kutatásunk újszerűsége abban rejlik, hogy egy új, kalibrálható, hordozható mérőrendszert fejlesztettünk ki és használtunk, amely lehetővé teszi a dinamikai mérések végrehajtását bármilyen típusú villamoson – akár valós időben – a napi üzemeltetés során, a menetrend szerinti villamosokon. Az okostelefonokhoz képest a jelenlegi rendszer előnye, hogy egyszerre három „kis számítógépen” (mérő-adatgyűjtőn) fut, de tetszés szerint bővíthető. Ezekhez a kis számítógépekhez akár többféle szenzor is csatlakoztatható, parallel-szinkrón mérésekre képes a járművek különböző pontjaira elhelyezve. A mérőrendszer relatíve olcsón összeállítható, a rendszer lényege a kompakt kialakítása. A rendszer „agya” a kifejlesztett program, amely egyrészt a kis számítógépeken folyamatosan fut mérés közben, másrészt azon programok, amelyek az adatkinyerést és -elemzést lehetővé teszik. A teljes összeállítás tesztfázisban működik, de a jövőben kalibrált-validált módon akár nagy mennyiségű adatgyűjtésre és -elemzésre is alkalmazható lehet a kötöttpályás hálózatokon.
A mérőműszer
A kifejlesztett, komplex mérőműszer több eszközkomponensből áll össze:
- Arduino MKR Zero,
- DS3231 RTC modul,
- ADXL345 gyorsulásmérő,
- Arduino MKR GPS Shield.
A komplex műszer két, különálló műszerként is működik.
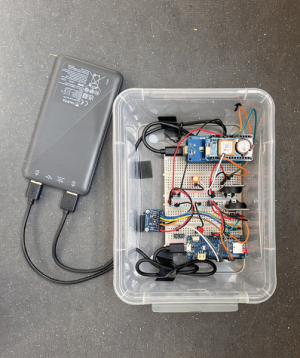
Az első műszer egy nagyobb egység, amelyet a mérések során rendszerint a menetrend szerint közlekedő járművek padlójára rögzítünk (1. ábra). Az Arduino MKR Zero a mérőeszköz központi eleme, amely egy SAMD21 Cortex-M0+ mikrovezérlőn alapul. Ideális alap, mivel teljesíti az adatgyűjtésre megadott kezdeti követelményeket. Ebben a műszerben található az Arduino MKR GPS Shield, amely kifejezetten az Arduino MKR sorozathoz készült és lehetővé teszi a GPS-adatok pontos rögzítését. A GPS-modul képes a globális pozicionálási rendszerek (például GPS, GLONASS, Galileo) által sugárzott jeleket fogadni és feldolgozni. A későbbi elemzésekhez a földrajzi szélesség, hosszúság, magasság és sebesség adatai kerülnek rögzítésre. Szintén az első műszer komponense egy ADXL345 gyorsulásmérő, egy kis, alacsony energiafogyasztású, háromtengelyű MEMS gyorsulásmérő, amely képes akár ±16 g-ig mérni a gyorsulást. Található még az egységben két darab valós idejű DS3231 óramodul, amely hőmérséklet-kompenzált kristályoszcillátorral (TCXO) rendelkezik a megfelelő pontosság érdekében.

A második műszer egy kisebb egység, amely a mérések során könnyen rögzíthető a menetrend szerint közlekedő járművek ablakára (2. ábra). Ez szintén tartalmaz egy Arduino MKR Zerót, egy DS3231 RTC modult és egy ADXL345 gyorsulásmérőt.
A műszerek használhatóságának szempontjából kulcsfontosságú volt, hogy a folyamatos hordozás és működés biztosítva legyen. Az eszközök energiaellátása egy külső powerbankról történik, amely garantálja a rendszer mobilitását és lehetővé teszi, hogy akár mozgó járművön is korlátozások nélkül működőképes legyen. A powerbank mikro-USB-kábel segítségével energiával látja el az Arduino MKR Zerót és ezt követően a mikrovezérlő felel a csatlakoztatott modulok energiaellátásáért (ADXL345, DS3231 RTC, MKR GPS Shield). Ez a konfiguráció elősegíti a rendszer egyszerűségét és a komponensek közötti zökkenőmentes energiaellátást.
A mérőeszközök az adatokat 32 GB-os SD-kártyára rögzítik, ami biztosítja az adatok nagy mennyiségű és hosszú távú tárolásának lehetőségét. A gyorsulásmérők által generált adatokat byte kód formában mentjük az SD-kártyára. Ez a módszer lehetővé teszi az adatok kompakt tárolását, miközben optimalizálja az írási sebességet, ami különösen fontos a valós idejű adatgyűjtés során. A gyűjtött adatok a mérések után külön program segítségével konvertálásra kerülnek a megfelelő formátumba.
A műszerek megépítése után fontos feladat volt a tesztelés, amelyet több módon végeztünk el. Az alapvető működési pontosság ellenőrzése céljából nyugalmi állapotban teszteltük az eszközt és ezzel együtt végeztük el a szükséges kalibrálást. Ezt a fázist egy kocka és kétpontos kalibrálás segítségével hajtottuk végre, ahol két darab tengelyen 0 g értéket, míg a harmadik tengelyen 1 g értéket vártunk el a gravitációs erő hatása miatt. Ez biztosította az eszköz helyesen kalibrált működését. (A jövőben természetesen hitelesített gyorsulásmérőkkel szükséges majd a kalibrációt elvégezni.) Az egyik fő tesztelési módszer személygépkocsi segítségével történt, ahol az eszközt különböző sebességeknél és manővereknél (például gyorsítás, fékezés, ívben haladás – kanyarodás) használtuk. Ez a tesztelési fázis lehetővé tette, hogy valós körülmények között értékeljük az eszköz teljesítményét. A megbízhatóság és pontosság további ellenőrzése érdekében összehasonlító teszteket végeztünk egy GoPro Hero Black 11 kamerába beépített gyorsulásmérővel. Az autóval végzett tesztelés során párhuzamosan rögzítettük az adatokat mindkét eszközzel, ami lehetővé tette az eredmények összevetését és a pontosság kiértékelését. A tesztek többszöri elvégzése után bebizonyosodott, hogy a műszerek megfelelően működnek és képesek menetrend szerint közlekedő villamosokon is méréseket végezni, adatokat menteni mérés közben.
Irodalomjegyzék
- [1] Ágh C. Comparative Analysis of Axlebox Accelerations in Correlation with Track Geometry Irregularities. Acta Technica Jaurinensis, 2019;12(2):161–177. DOI: 10.14513/actatechjaur.v12.n2.501.
- [2] Prescott D, Andrews J. A track ballast maintenance and inspection model for a rail network. Proc Inst Mech Eng O J Risk Reliab 2013;227(3):251–266. DOI: 10.1177/1748006X13482848.
- [3] Hyslip JP. Fractal analysis of track geometry data. Transp Res Rec 2002;1785:50–57. DOI: 10.3141/1785-07.
- [4] Cai X, Zhao L, Lau ALL, Tan S, Cui R. Analysis of vehicle dynamic behavior under ballasted track irregularities in high-speed railway. Noise and Vibration Worldwide 2015;46(10):10–17. DOI: 10.1260/0957-4565.46.10.10.
- [5] Eklöf K, Nwichi-Holdsworth A, Eklöf J. Novel algorithm for mutual alignment of railway track geometry measurements. Transp Res Rec, 2021;2675(12):995–1004. DOI: 10.1177/03611981211031906.
- [6] Ágh C. Connection Between Track Geometry Quality and Dynamic Vehicle Response At Various Speeds. Baltic Journal of Road and Bridge Engineering 2023;18(3):169–187. DOI: 10.7250/bjrbe.2023-18.613.
- [7] Weston PF, Ling CS, Goodman CJ, Roberts C, Li P, Goodall RM. Monitoring lateral track irregularity from in-service railway vehicles. Proc Inst Mech Eng F J Rail Rapid Transit 2007;221(1):89–100. DOI: 10.1243/0954409JRRT64.
- [8] Európai Szabványügyi Bizottság. MSZ EN 13848-6:2014+A1:2021. Vasúti alkalmazások. Vasúti pálya. A vágánygeometria minősége. 6. rész: A vágánygeometria minőségének jellemzése. 2020 [Online]. Available: https://ugyintezes.mszt.hu/webaruhaz/szabvany-adatok?standard=139604
- [9] Andrade AR, Teixeira PF. Statistical modelling of railway track geometry degradation using Hierarchical Bayesian models. Reliab Eng Syst Saf 2015;142:169–183. DOI: 10.1016/j.ress.2015.05.009.
- [10] Perrin G, Soize C, Duhamel D, Funfschilling C. Track irregularities stochastic modeling. Probabilistic Engineering Mechanics 2013;34:123–130. DOI: 10.1016/j.probengmech.2013.08.006.
- [11] Lestoille N, Soize C, Funfschilling C. Sensitivity of train stochastic dynamics to long-term evolution of track irregularities. Vehicle System Dynamics 2016;54(5):545–567. DOI: 10.1080/00423114.2016.1142095.
- [12] Gao T, Cong J, Wang P, Liu J, Wang Y, He Q. Vertical track irregularity analysis of high-speed railways on simply-supported beam bridges based on the virtual track inspection method. Proc Inst Mech Eng F J Rail Rapid Transit 2021;235(3):328–338. DOI: 10.1177/0954409720924574.
- [13] Li D, Meddah A, Hass K, Kalay S. Relating track geometry to vehicle performance using neural network approach. Proc Inst Mech Eng F J Rail Rapid Transit 2006;220(3):273–281. DOI: 10.1243/09544097JRRT39.
- [14] Mehrali M, Esmaeili M, Mohammadzadeh S. Application of data mining techniques for the investigation of track geometry and stiffness variation. Proc Inst Mech Eng F J Rail Rapid Transit 2020;234(5):439–453. DOI: 10.1177/0954409719844885.
- [15] Sadeghi J, Fathali M, Boloukian N. Development of a new track geometry assessment technique incorporating rail cant factor. Proc Inst Mech Eng F J Rail Rapid Transit 2009;223(3):255–263. DOI: 10.1243/09544097JRRT237.
- [16] Specht C, Koc W, Chrostowski P. Computer-aided evaluation of the railway track geometry on the basis of satellite measurements. Open Engineering 2016;6(1):125–134. DOI: 10.1515/eng-2016-0017.
- [17] Vinkó Á, Simonek T, Ágh C, Csikós A, Figura B. Feasibility of Onboard Smartphones for Railway Track Geometry Estimation: Sensing Capabilities and Characterization. Periodica Polytechnica Civil Engineering 2023;67(1):200–210. DOI: 10.3311/PPci.20187.
- [18] Xie J, Huang J, Zeng C, Jiang SH, Podlich N. Systematic literature review on data-driven models for predictive maintenance of railway track: Implications in geotechnical engineering. Geosciences (Basel) 2020;10(11):1–24. DOI: 10.3390/geosciences10110425.
- [19] Skrickij V, Šabanovi E. Visual Measurement System for Wheel – Rail Lateral. Sensors 2021;21(4):1297. [Online]. Available: https://dx.doi.org/10.3390/s21041297%0Ahttp://10.0.13.62/s21041297
- [20] Farkas A. Measurement of railway track geometry: A state-of-the-art review. Periodica Polytechnica Transportation Engineering 2019;48(1):76–88. DOI: 10.3311/PPtr.14145.
- [21] Pombo J, Ambrósio J. An alternative method to include track irregularities in railway vehicle dynamic analyses. Nonlinear Dyn 2012;68(1–2):161–176. DOI: 10.1007/s11071-011-0212-2.
- [22] Vinkó Á, Bocz P. Experimental investigation on condition monitoring opportunities of tramway tracks. Periodica Polytechnica Civil Engineering 2018;62(1):180–190. DOI: 10.3311/PPci.10541.
- [23] Giannakos KS. Control of the Geometry of a Railway Track: Measurements of Defects and Theoretical Simulation. International Journal on Applied Physics and Engineering 2023;1:102–115. DOI: 10.37394/232030.2022.1.11.
- [24] Costa JN, Antunes P, Magalhães H, Pombo J, Ambrósio J. A finite element methodology to model flexible tracks with arbitrary geometry for railway dynamics applications. Comput Struct 2021;254:106519. DOI: 10.1016/j.compstruc.2021.106519.
- [25] BKV Zrt. Közúti vasúti infrastruktúra tervezési irányelvek. 2019 [Online]. Available: https://www.bkv.hu/ftp/vir/1_tervezesi_iranyelvek.pdf
- [26] Jóvér V, Fischer S. Közúti vasúti felépítményrendszerek vágánygeometriai és járműdinamikai vizsgálata. In: City Rail 2022, 7-8 September 2022, Balatonfenyves (Hungary). pp. 121–135. [Online]. Available: https://www.researchgate.net/publication/363693483_Kozuti_vasuti_felepitmenyrendszerek_vaganygeometriai_es_jarmudinamikai_vizsgalata
- [27] BKV Zrt. P.1. I. kötet - Közúti Vasúti Pályaépítési és Fenntartási Műszaki Utasítás.” 2019 [Online]. Available: https://www.bkv.hu/ftp/vir/2_muszaki_utasitas.pdf
- [28] Benda G, Fejes B. Villamosok.hu. Accessed: May 20, 2024. [Online]. Available: https://villamosok.hu/
Ha szeretne rendszeresen hozzájutni a legfrisebb számokhoz, fizessen elő a folyóiratra.